

 MEDITEL ha recentemente partecipato al progetto “A-Mobility” nell’ambito dell’iniziativa “BORGO4.0” promossa dalla Regione Campania e composta da svariati progetti di ricerca concomitanti e destinata alla creazione, nell’ambito del territorio comunale di Lioni (AV), di una piattaforma operativa per la sperimentazione di tecnologie innovative finalizzate alla mobilità sostenibile e che riguardano interventi diretti sia al miglioramento delle tecnologie dei veicoli e sia alla realizzazione e ottimizzazione delle infrastrutture di connessione.
In particolare, A-Mobility nasce con l’obiettivo di migliorare le tecnologie esistenti finalizzate alla realizzazione di veicoli a guida autonoma mediante l’introduzione di sistemi hardware e software in grado di ottimizzare le performance dei veicoli autonomi in condizioni di manovra specifiche e in scenari di traffico complessi.
Le attività di responsabilità Meditel hanno riguardato principalmente lo scouting tecnologico di piattaforme e tecnologie per il settore automotive, – in particolare di On-Board Unit (OBU-V2X) -, nonché la sua integrazione e interfacciamento con altri moduli e infine lo studio dell’architettura hardware e la progettazione di schede elettroniche con la selezione della componentistica adeguata.
Le tematiche affrontate hanno incluso:
MEDITEL ha recentemente partecipato al progetto “A-Mobility” nell’ambito dell’iniziativa “BORGO4.0” promossa dalla Regione Campania e composta da svariati progetti di ricerca concomitanti e destinata alla creazione, nell’ambito del territorio comunale di Lioni (AV), di una piattaforma operativa per la sperimentazione di tecnologie innovative finalizzate alla mobilità sostenibile e che riguardano interventi diretti sia al miglioramento delle tecnologie dei veicoli e sia alla realizzazione e ottimizzazione delle infrastrutture di connessione.
In particolare, A-Mobility nasce con l’obiettivo di migliorare le tecnologie esistenti finalizzate alla realizzazione di veicoli a guida autonoma mediante l’introduzione di sistemi hardware e software in grado di ottimizzare le performance dei veicoli autonomi in condizioni di manovra specifiche e in scenari di traffico complessi.
Le attività di responsabilità Meditel hanno riguardato principalmente lo scouting tecnologico di piattaforme e tecnologie per il settore automotive, – in particolare di On-Board Unit (OBU-V2X) -, nonché la sua integrazione e interfacciamento con altri moduli e infine lo studio dell’architettura hardware e la progettazione di schede elettroniche con la selezione della componentistica adeguata.
Le tematiche affrontate hanno incluso:
1) Studi e ricerche sull’architettura hardware di sistemi di computazione ad alte prestazioni, da integrare e sperimentare con i vari sottosistemi di bordo realizzati dai partner di progetto. In particolare, si è individuata, configurata ed utilizzata per la sperimentazione una piattaforma di bordo veicolo (“7StarLake”) multi-interfaccia – ad es. CAN, LAN, PoE, USB – e in grado di supportare il collegamento di telecamere PoE , per analizzarne con algoritmi dedicati i flussi video ed implementare, a valle dell’elaborazione, la comunicazione delle risultanze dell’analisi dall’autoveicolo verso l’infrastruttura esterna di supporto alla viabilità.
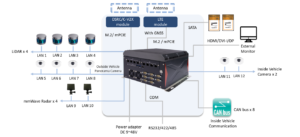
Figura 1 Dettaglio possibilità di uso delle interfacce della piattaforma 7StarLake


Figura 2 Fronte e retro della piattaforma 7StarLake
2) Integrazione della OBU-V2X con la piattaforma veicolare ad alte prestazioni. Il modulo individuato per la trasmissione dei dati in V2X è l’OBU-301E della Unex.
Figura 3 OBU-301E Unex
3) Progettazione e sviluppo di schede hardware finalizzate a garantire un posizionamento accurato del veicolo all’interno di un sistema di guida autonoma. In particolare, le attività Meditel hanno riguardato la progettazione di una piattaforma fisica a supporto di un modulo satellitare capace di catturare informazioni di posizionamento da costellazioni satellitari multiple (GPS /Galileo/ Glonass/ BeiDou/ QZSS), opportunamente supportato dalla dotazione di bordo della scheda in termini di circuiti di adattamento e polarizzazione del ramo di antenna. La MEDITEL ha curato tutte le fasi per la progettazione, la realizzazione e il test della scheda di posizionamento, nelle sue molteplici articolazioni di: • Progettazione di definizione e scelta della componentistica • Design dello schema elettrico (la board è stata dotata in questa fase di ulteriori interfacce di comunicazione per garantire futura espandibilità) • Sbroglio della scheda con la realizzazione dei file di produzione utili alla realizzazione del circuito stampato • Produzione e validazione dei primi prototipi operativi • Validazione e test delle funzionalità di base realizzata, realizzando appositi algoritmi per il microcontrollore di bordo • Progettazione e realizzazione di un case custom capace di contenere la scheda fornendogli protezione una volta installata a bordo veicolo.
Figura 4 Scheda per il positioning accurato